Rodney Brooks builds robots and questions the assumptions of artificial intelligence. He co-founded iRobot and Rethink Robotics, developed the subsumption architecture that powers reactive machines like the Roomba, and consistently tracks his own technology predictions to hold the industry accountable. This collection catalogs his arguments on why building physical bodies for machines is harder than writing software, how aging populations drive automation, and why human-like thought remains a distant reality.
Part 1: The Illusion of Intelligence
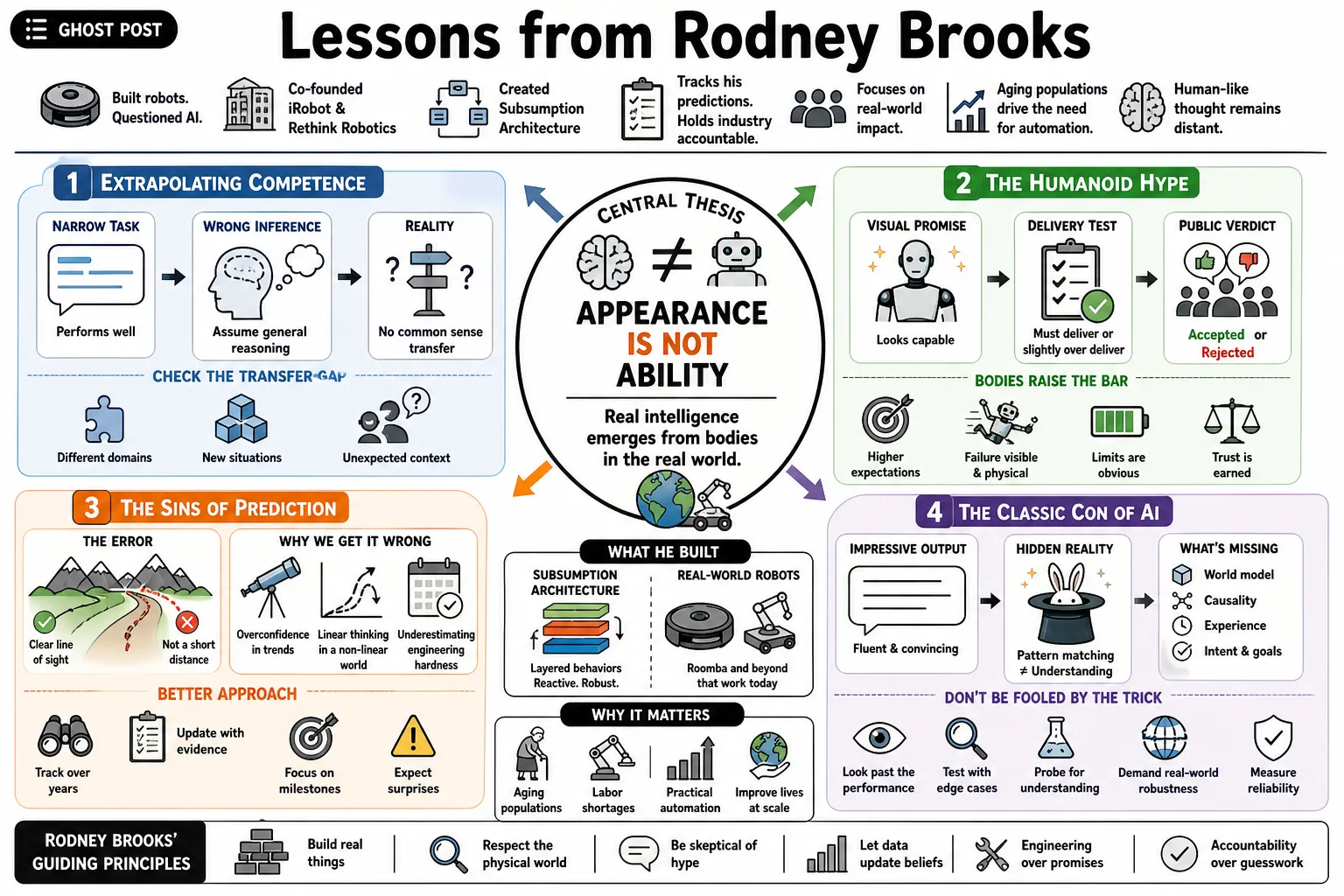
- On Extrapolating Competence: "People see an AI perform well on a narrow task, like language generation, and incorrectly assume it possesses general reasoning or common sense." — Source: [Effective Altruism]
- On The Humanoid Hype: "The visual appearance of a robot makes a promise about what it can do and how smart it is. It needs to deliver or slightly over deliver on that promise or it will not be accepted." — Source: [Rodney Brooks' Blog]
- On The Sins of Prediction: "When predicting the future of artificial intelligence, experts routinely make the error of mistaking a clear line of sight for a short physical distance to the goal." — Source: [Rodney Brooks' Blog]
- On The Classic Con of AI: "An AI's ability to communicate fluently tricks humans into attributing a level of competence that simply does not exist." — Source: [Effective Altruism]
- On The Limits of LLMs: "Large Language Models do not reason in the human sense, despite their impressive facility with generating written words." — Source: [Rodney Brooks' Blog]
- On Humanoid Realities: "Just because a robot looks human does not mean it possesses human capabilities. Practicality often loses out to appearance in hype cycles." — Source: [Stanford University]
- On The Theater of Demos: "Many humanoid robots are the subjects of theater and shaky, unreliable demos, failing to address the incredibly difficult challenge of deploying machines into the real world." — Source: [Automate.org]
- On Amara's Law: "We overestimate technology in the short term, and we underestimate it in the long term, which explains why robots seem limited now but will become indispensable later." — Source: [Cornerstone OnDemand]
- On The Reality of Physics: "Deploying robots into the physical world is incredibly difficult because physics doesn't forgive in ways that software does." — Source: [AI x Robotics Research Symposium]
- On Historical Hype Cycles: "Today’s AI excitement mirrors past technology hype cycles, where immense promises clash with the slow grind of actual technical delivery." — Source: [Reddit AMAs]
Part 2: Subsumption Architecture and The Real World
- On World Modeling: "The world is its own best model. It is always exactly up to date. It always has every detail there is to be known." — Source: [Aera Vision]
- On Direct Interaction: "Rather than building a complex, computationally expensive internal model of the world, robots should interact directly with the environment." — Source: [Rodney Brooks' Blog]
- On Emergent Behavior: "Multiple behaviors couple with the environment to produce actions that are more than simple strings or suppositions of the elementary behaviors." — Source: [Mondotheque]
- On Bottom-Up Intelligence: "Researchers should focus on bottom-up systems that interact directly with the physical world, rather than top-down symbolic logic." — Source: [Rutgers University]
- On Evolutionary Building Blocks: "The study of an inherited biological substrate may well provide the necessary building blocks for all the higher-level intelligence that we humans are so proud of." — Source: [Rutgers University]
- On True Intelligence: "True intelligence emerged from basic survival behaviors in the physical world, not from abstract, centralized reasoning." — Source: [American Academy of Arts and Sciences]
- On Removing Central Control: "Intelligence without representation challenges the assumption that human-like intelligence requires central, high-level processing." — Source: [Duke University]
- On Reactive Systems: "Robots do not need complex internal models of the world to be intelligent. They can simply sense and react to their environment in real-time." — Source: [University of York]
- On Common Sense in Robotics: "Our robots have a little tiny bit of common sense. Our robots know that if they've got something in their hand and they drop it, it's gone." — Source: [QuoteFancy]
- On Nouvelle AI: "Intelligence is determined by the dynamics of interaction with the world, not the complexity of internal algorithms." — Source: [Wikipedia - Cambrian Intelligence]
Part 3: The Demographic Inversion
- On The Aging Workforce: "The world is experiencing a demographic inversion where the percentage of working-age adults is dropping while the elderly population is growing." — Source: [TED]
- On Labor Shortages: "Countries are already suffering from a shortage of labor, particularly for dull, repetitive jobs in manufacturing and other physical industries." — Source: [Rodney Brooks' Blog]
- On Necessary Automation: "Demographic shifts are a primary driver for the necessity and future adoption of robotics in the global economy." — Source: [Cornerstone OnDemand]
- On Retaining Independence: "Robots will be critical in helping the elderly maintain their independence, stay in their homes longer, and retain control over their lives." — Source: [TED]
- On The Scarcity of Caregivers: "As the younger workforce shrinks, we cannot rely on human caregivers alone to support the growing elderly population." — Source: [Rodney Brooks' Blog]
- On Driving Productivity: "By automating mundane or physically demanding tasks, robots can allow the remaining, smaller workforce to be more productive and focus on higher-level work." — Source: [GE]
- On Social Robots: "Social robots must be practical, safe, and easy for ordinary people to interact with. This is a stark contrast to the complex, dangerous industrial robots of the past." — Source: [Medium]
- On Inevitable Forces: "The aging of the population is not merely a trend, but an inevitable force that will mandate the integration of robotics into daily life." — Source: [Cornerstone OnDemand]
- On Aging in Place: "The goal is to use technology so that people can age in place gracefully, without sacrificing their dignity or requiring constant human supervision." — Source: [Brown Alumni Magazine]
- On The Underestimation of Need: "We are likely underestimating the profound necessity and reliance we will have on robotic assistance in the coming decades." — Source: [TED]
Part 4: Autonomous Vehicles and The Achilles Paradox
- On Slipping Timelines: "The industry has often been sold the same vision of imminent autonomy repeatedly, only for timelines to consistently slip." — Source: [Automate.org]
- On The Shifting Definition: "The definition of self-driving has shifted over time, moving from cars that require no human input to vehicles that still rely on remote human monitors." — Source: [Rodney Brooks' Blog]
- On Lack of Agency in AVs: "If you're in a driverless car, you can't say to go another hundred feet before you get out. You are at the limit it decided, and it really annoys you." — Source: [Robust.AI]
- On The Illusion of Imminence: "Industry promises that fully autonomous, driverless cars were just around the corner have historically ignored the immense technical hurdles." — Source: [Rodney Brooks' Blog]
- On Remote Human Interventions: "The need for remote human intervention to ensure reliability negatively impacts the business case and return on investment for autonomous taxi services." — Source: [Rodney Brooks' Blog]
- On The Achilles Paradox: "The perpetual motion of autonomous vehicle finish lines resembles the Achilles paradox, where the goal always remains slightly out of reach." — Source: [Automate.org]
- On Radical Transformations: "While early predictions envisioned radical societal changes, the actual path forward involves slow, incremental improvements." — Source: [CED Engineering]
- On Executive Claims: "There is a persistent discrepancy between the high-profile predictions made by executives and the actual, delivered outcomes of autonomous fleets." — Source: [Rodney Brooks' Blog]
- On Edge Cases: "Real-world autonomy is constrained by edge cases and safety requirements that are far more difficult to solve than controlled demonstrations suggest." — Source: [Humanoid Guide]
Part 5: Flesh and Machines
- On Overanthropomorphizing: "All of us overanthropomorphize humans, who are after all mere machines." — Source: [eJewish Philanthropy]
- On Human Mechanics: "I, you, our family, friends, and dogs are all machines. We are really sophisticated machines made up of billions and billions of biomolecules." — Source: [Georgia Tech]
- On Biological Parallels: "Our physiology may be different, but at heart I am saying we are much like the robot Genghis, although somewhat more complex." — Source: [Dordt University]
- On Replicating Rules: "In principle there's no reason why we shouldn't be able to replicate the rules of biology in silicon and steel." — Source: [Georgia Tech]
- On Human Specialness: "The realization that humans are essentially machines is the next major blow to human specialness, following the discoveries that Earth isn't the universe's center and that we evolved from apes." — Source: [University of Waterloo]
- On Understanding Our Place: "Our work in robotics is part of the continuing journey to understand our own place in the physical world." — Source: [Goodreads]
- On The Rights of Machines: "Two big questions that people ask me are: if we make these robots more and more human-like, will we accept them, and will they need rights eventually?" — Source: [QuoteFancy]
- On The Fear of Takeover: "The other question people ask me is whether robots will want to take over. These fears stem from our tendency to project human intent onto complex mechanics." — Source: [QuoteFancy]
- On Biomolecular Complexity: "The difference between us and robots is currently one of degree and material complexity, not of fundamentally different operating principles." — Source: [Georgia Tech]
Part 6: Fast, Cheap, and Out of Control
- On Space Exploration Philosophy: "Instead of building a single, extremely expensive, and complex robot, we should send a large number of simple, inexpensive, and autonomous robots." — Source: [Grokipedia]
- On Mitigating Mission Failure: "A single monolithic rover faces a high risk of mission failure if it breaks. A swarm of cheaper robots ensures the mission survives individual casualties." — Source: [Grokipedia]
- On Decentralized Behavior: "Contrarian approaches to AI favor decentralized, emergent behavior over centralized, top-down control." — Source: [Duke University]
- On The Robot Invasion: "A robot invasion of the solar system relies on mass distribution of expendable, specialized machines rather than delicate, generalized ones." — Source: [Bryn Mawr College]
- On Robustness Through Simplicity: "Simplicity in individual robotic design leads to profound robustness when deployed in unpredictable environments like Mars or the Moon." — Source: [KK.org]
- On The Paradigm Shift: "The concept of building fast and cheap shifted the paradigm from cautious, heavy engineering to agile, risk-tolerant deployment." — Source: [Wikipedia - Fast, Cheap & Out of Control]
- On Giving Up Absolute Control: "To achieve complex tasks in chaotic environments, designers must be willing to let robots operate without micromanaged control." — Source: [Daily Dose of Art]
- On Swarm Intelligence: "A multitude of simple agents, interacting locally with their environment, can solve problems that would paralyze a single, heavily burdened supercomputer." — Source: [Duke University]
- On Rethinking Space Hardware: "Space robotics needs to move away from the mindset of building flawless, billion-dollar monuments and toward iterative, disposable utility." — Source: [Grokipedia]
Part 7: Human-Robot Collaboration
- On The Humans in the Loop: "The most successful deployments of AI and robotics involve humans working in tandem with the technology, rather than replacing them entirely." — Source: [Chatbots Decoded Interview: Rodney Brooks]
- On Smoothing the Edges: "AI is a tool that can assist humans, with human intelligence used to smooth the edges of the system's performance." — Source: [Robust.AI]
- On Essential Collaborators: "Robots will not simply take jobs. They will become essential collaborators that amplify the capabilities of human workers." — Source: [Cornerstone OnDemand]
- On Collaborative Design: "A robot must be designed to work around people safely, meaning it needs inherent compliance and user-friendly interfaces." — Source: [MIT]
- On Real-World Integration: "The robot has to work with no external intervention from the people who designed and built it. It needs to be a good experience for the people around it." — Source: [Rodney Brooks' Blog]
- On Avoiding Full Automation: "Rather than aiming for full automation that removes people entirely, we should design systems that leverage the unique adaptability of the human mind." — Source: [Rodney Brooks' Blog]
- On The Limits of Repetition: "Robots are good at very simple things like cleaning the floor and doing repetitive tasks. Humans remain essential for handling unstructured anomalies." — Source: [QuoteFancy]
- On The Realist Perspective: "Being a realist regarding AI means acknowledging that while technology will change workflows, the human element remains economically and practically indispensable." — Source: [EconTalk]
- On User Acceptance: "If a robot isn't a good experience for the people around it, there will not be more sales to those, and perhaps other, customers." — Source: [Rodney Brooks' Blog]
Part 8: The Reality of Commercial Deployment
- On The Ten-Year Rule: "Technologies for robots need ten or more years of steady improvement beyond lab demos of the target tasks to mature to low cost and have their limitations characterized well enough." — Source: [Rodney Brooks' Blog]
- On The Reliability Standard: "Real industrial utility requires long-term development so that systems can deliver 99.9% of the time without fail." — Source: [Rodney Brooks' Blog]
- On Dexterity Challenges: "True physical dexterity remains an elusive challenge in robotics, far trailing our advances in digital computation." — Source: [AI x Robotics Research Symposium]
- On Investment Tensions: "There is often a tension between heavy venture capital investment seeking rapid returns and the deep, slow technical work required to actually advance robotics." — Source: [Forbes America Innovates]
- On Predicting the Future: "Predicting the timeline of AI advancements is fraught with peril. Experts routinely mistake clear line-of-sight for short distance." — Source: [Rodney Brooks' Blog]
- On The Difficulty of Deployment: "Getting a robot to perform once in a lab is science. Getting it to perform thousands of times in chaotic human environments is a grueling engineering reality." — Source: [Automate.org]
- On Task-Specific Utility: "We should advocate for task-specific, reliable designs rather than attempting to force complex platforms into roles they are not yet ready to handle." — Source: [Stanford University]
- On The Economics of Autonomy: "If a system requires constant remote human supervision to resolve edge cases, the economic argument for autonomy quickly falls apart." — Source: [Rodney Brooks' Blog]
- On Maintaining Accountability: "Maintaining a public predictions scorecard is a way to hold the industry accountable and provide a realistic perspective on what is actually being achieved versus what is promised." — Source: [Rodney Brooks' Blog]